
I have been busy working on giving Bernie a way to get around. He won't be autonomous (that's a whole other level of complexity and honestly I don't need a dragon who can move around when I'm not there, that's just going to lead to disaster!), but he will be able to move around on wheels under control from the Playstation controller and he has four legs to crawl around on.
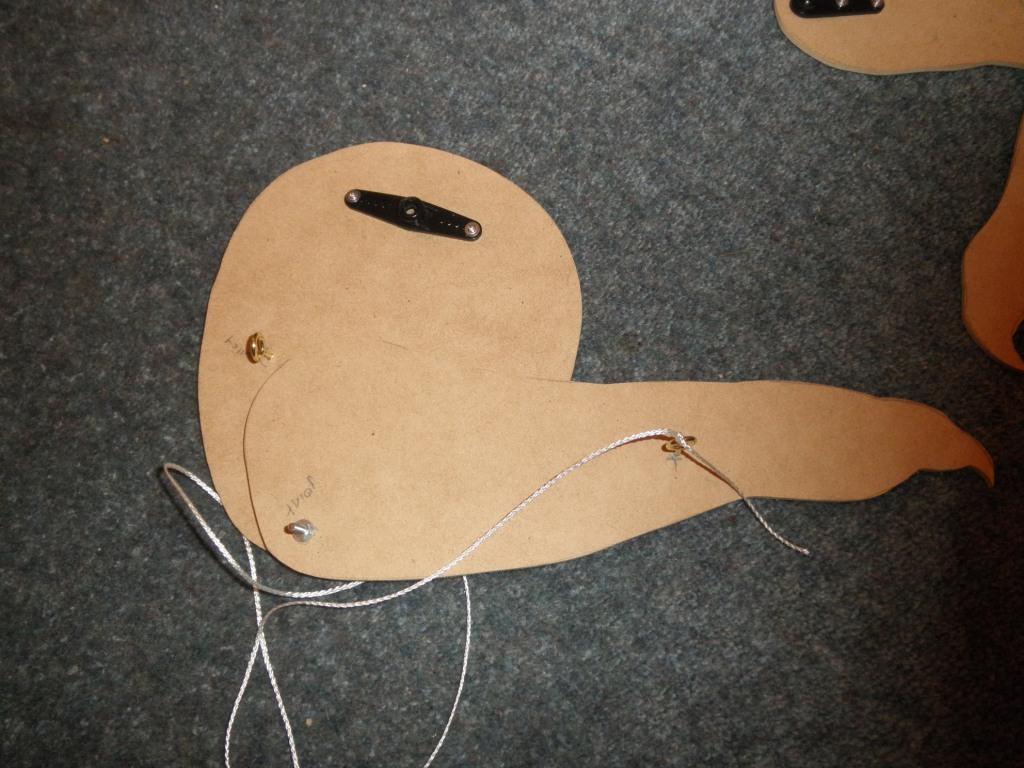
Each leg has a bearing joint in the knee/elbow, which is made up of a screw, nut, some washers and most importantly one rivet attached to each piece of wood to allow the parts of the leg to move around the screw without too much friction.
Each leg has a bearing joint in the knee/elbow, which is made up of a screw, nut, some washers and most importantly one rivet attached to each piece of wood to allow the parts of the leg to move around the screw without too much friction.

Once in place, the bearings work very nicely for letting the leg move, but they initially didn't do much to stop the leg splaying out to the side, so to avoid this I added the third rivet which you can see in the top picture, as well as a second section of the lower leg which is supported by a 6mm spacer (just visible in the picture on the left) to allow the joint to move freely around the screw without moving sideways. I also replaced the nuts with nyloc nuts so that the repeated rotation and vibration doesn't continually loosen the joint. This way tightening the nut on each joint gives me very good control over how much resistance the joint offers to rotation as well as how much the lower leg wobbles around.
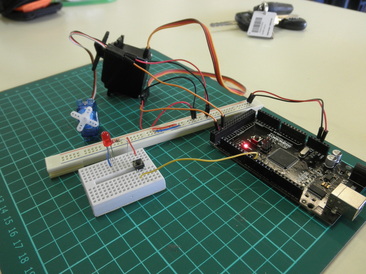
Reconnecting the legs to the body and wiring up the servos to the arduino made it very simple to test out a basic walking motion. The timing still needs some work, and without the wheels and tail to provide resistance the whole body has a tendency to wobble around, but the basic idea is there and the pulley system seems to be working nicely.
Reconnecting the legs to the body and wiring up the servos to the arduino made it very simple to test out a basic walking motion. The timing still needs some work, and without the wheels and tail to provide resistance the whole body has a tendency to wobble around, but the basic idea is there and the pulley system seems to be working nicely.
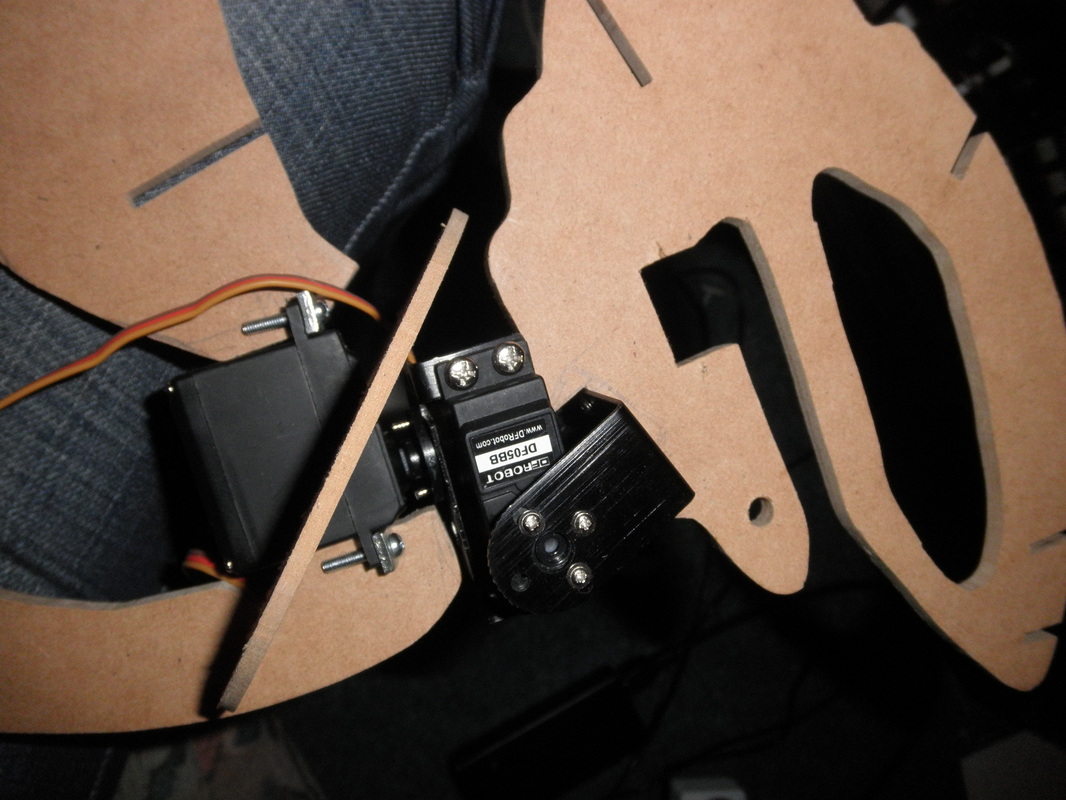
To make the legs move a bit nicer I need to make the hips more rigid by adding some blocks around the join to the spine and also reinforce the screws joining the servo horns to the hips. hopefully I will have that done by the end of the week and can move on to the final programming of the walk motion.
Did you notice he's not actually getting anywhere? I have some lovely little micro geared motors and wheels from pololu (bought through littlebirdelectronics) which I have wired up through an ardumotor shield and will be mounting as soon as possible, however the scroll saw is out of action for the moment so I can't cut the recesses in the body to mount the axle supports. These will also raise the body off the floor by about 15mm so the legs can move more easily without rocking the body from side to side.









 RSS Feed
RSS Feed
